Aircraft Transmitters-AT Series
Aircraft Transmitters -T Series
Surface Transmitters
ELRS Long-range Module
Wireless Trainer System
AT10 II
AT9S Pro
T16D
T12D
T8FB(BT)
T8S(BT)
Trainer Cable
TWC
RC8P
RC8X
RC6GS V3
RC4GS V3
NEW
2.4G(1W)
915(1W)
2.4G Micro(1W)
FC for Fixed Wing
GPS
RTK Kit
12C Boards
Ultrasonic Sensor
12C Expansion Board
l2C Transfer Board
Digital Video
Transmission Adapter Board
Flight Controller(Mission Planner)
PIX6
CrossFlight-CE
CrossFlight
F405
F722
CrossRace Pro
CrossRace
Mini Pix
PIXHAWK
Byme-DB
Byme-A
Byme-D
DiViT
SUI04
SU04
RTK F9P
ANT-M7
ANT-B10
SE100(M10N)
TS100(M10N)
TS100(M8N)
Multirotors - Brushless Motor
Multirotors - Coreless Motor
Fixed-Wing
Drone Soccer - Brushless Motor
LD-A40
LD-B20
LD-B20C
BDS200
Drone Soccer - Coreless Motor
VDS200
F108
Wolf QAV250
M435
F330
F450
F121
F121 Pro
F125
A560
SU27
D460
BATTERY CHARGER
CB86-PLUS
CM210
CM120
RE15A 2S
ESC for Fixed-Wings
ESC for Drones
AM32-70A
ESC for Cars/Boats
CL9030
Receivers - compatible with AT10II, AT10, AT9S Pro, AT9S, AT9
Receivers - T16D, T12D, T8FB, T8S, RC8X, RC6GS V3, RC4GS V3, RC6GS V2, RC6GS, RC4GS V2, RC4GS
Telemetry Module
R12DS
R12DSE
R9DS
R6DS
R6DSM
PRM-01
PRM-03
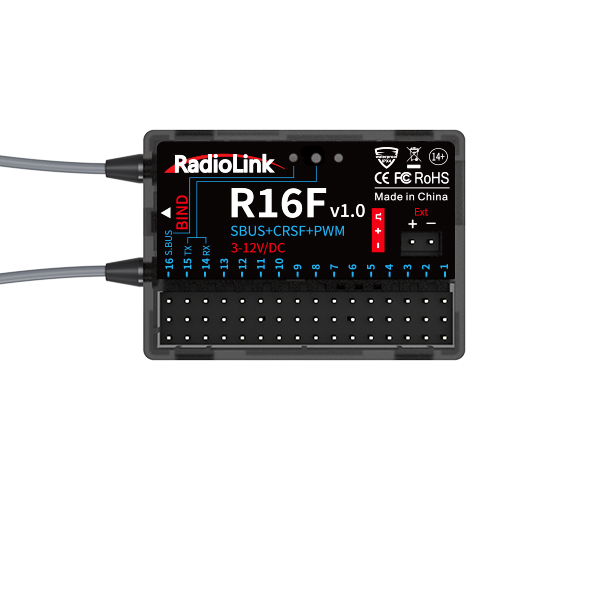
R16F
R16SM
R12F
R8FGH
R8EF
R8FG
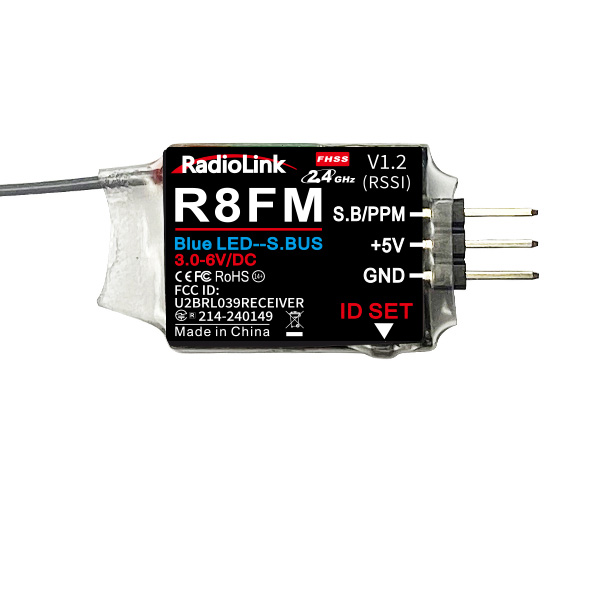
R8FM
R8SM
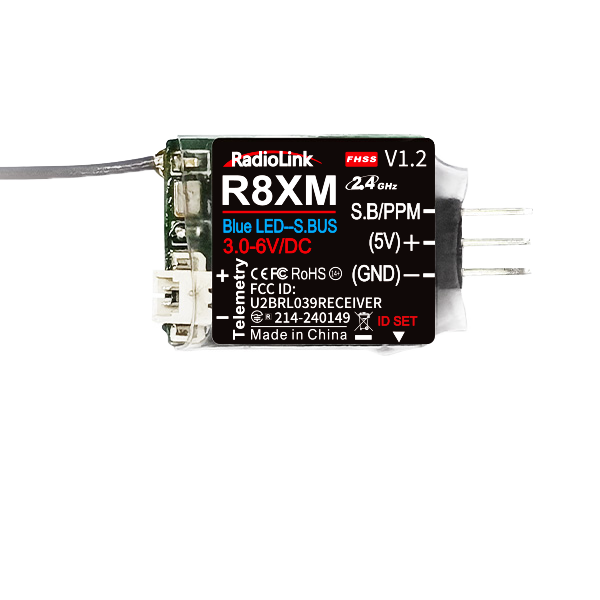
R8XM
R7FG
R6FG
R6F
R4FGM
ELRS Receiver
ER16(2.4G)
ELRS(915MHz)

































































 简体中文
简体中文 English
English




 简体中文English简体中文English简体中文English
简体中文English简体中文English简体中文English